
借鑒地(dì)面交通(tōng)與民(mín)航空(σ>≈kōng)域管理(lǐ)發展曆程和(hé)經驗,從(cóng)管理(lǐε♦✔σ)和(hé)技(jì)術(shù)兩方面加強政策引導× ®<與市(shì)場(chǎng)規範,循序漸進分(☆¥δ¶fēn)步實施。
技(jì)術(shù)手段 ● 飛(fēi)行(xíng)任務注冊及審批 &n↔♦σ÷bsp; ● 無人(rén)機(jī)偵察探測 ¥&↓; ● 無人(rén)機(jī)實時(shí)監測 ● 無人(rén)機(jī)管控預警 &n÷£bsp; ● 無人(rén)機(jī)壓制(zhì)接管 ● 無人(rén)機(jī)飛(fēi)手捕獲 | 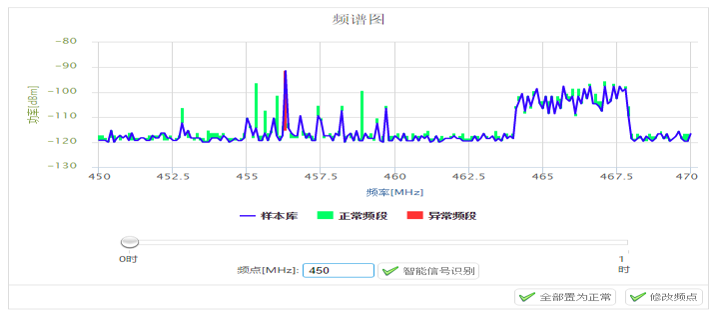 |
對(duì)空(kōng)偵查 ● 固定式對(duì)空(kōng)成像∞ε雷達 ● 小(xiǎo)型車(chē)載雷達 &n∞£bsp; ● 紅(hóng)外(wài)探測儀 ● 無線信号探測裝置 | 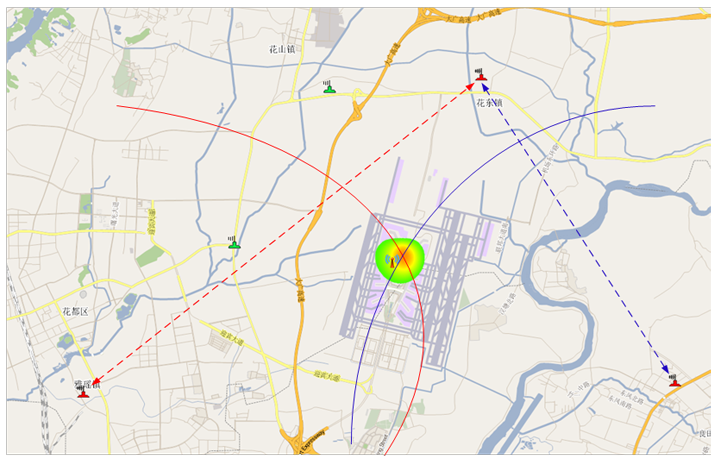 |
地(dì)面監控 ● 當前地(dì)理(lǐ)位置顯示 ¶₽₹• ● 空(kōng)域與航線顯示 ● 飛(fēi)行(xíng)參數(shù)查詢 &£∏nbsp; ● 威脅評估預警 | 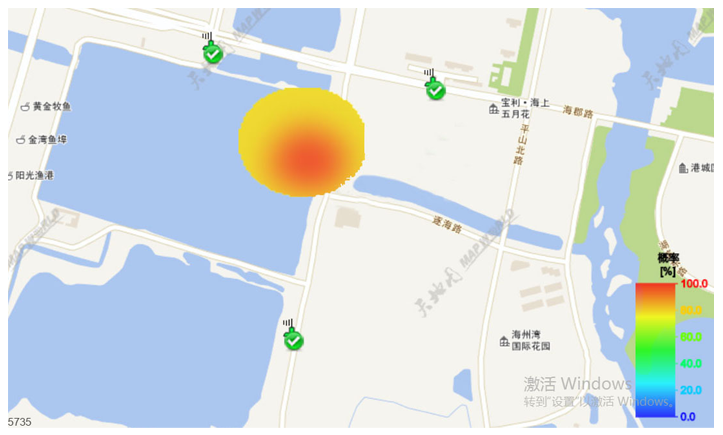 |
無人(rén)機(jī)飛(fēi)手定位
● 快(kuài)速精确定位無人(rén)機(jī§★↑≠)飛(fēi)手位置
● 基于頻(pín)譜自(zì)動化(huà)實時(shí)比對(duì)↕♥原理(lǐ),實現(xiàn)遙控信号頻(pín)率實時λ♠(shí)精确定位及采集
● 實現(xiàn)多(duō)路(lù)同步遙控信号全自(zì)動化± (huà)融合處理(lǐ)分(fēn)析
● 基于TDOA算(suàn)法原理(lǐ),實現(xiàn)λ 飛(fēi)手位置快(kuài)速精确定位
● 飛(fēi)手定位效率高(gāo):從(c§≠óng)啓動至飛(fēi)手定位結果收斂時(shí)間(jiān)不(bù)∑∑足10秒(miǎo)
● 飛(fēi)手定位精度高(gāo):平均定位誤→✘★差僅100米左右
● 全自(zì)動化(huà)智能(néng)化(huàγ$♥λ)一(yī)體(tǐ)化(huà)機(jī)制(zhì)
● 快(kuài)速智能(néng)判斷是(shì)否為(wèi)黑(®♦φ∞hēi)飛(fēi)或亂飛(fēi),使無人(rén)機(jī)監≤✘©管更智能(néng)、高(gāo)效
● 實現(xiàn)非法無人(rén)機(jī)幕後操控手位置實時(sh≠≥₹βí)定位及地(dì)圖顯示,從(cóng)♦σ€根本上(shàng)解決非法無人(rén)機(jī)管¶÷控

